Montage du boitier arduino pour iMA
- Fixer la mini plaque d’essai sur le ProtoShield
- Fixer le ProtoShield sur la carte Arduino
- Câbler les capteurs au montage Arduino/Protoshield selon le schéma suivant :
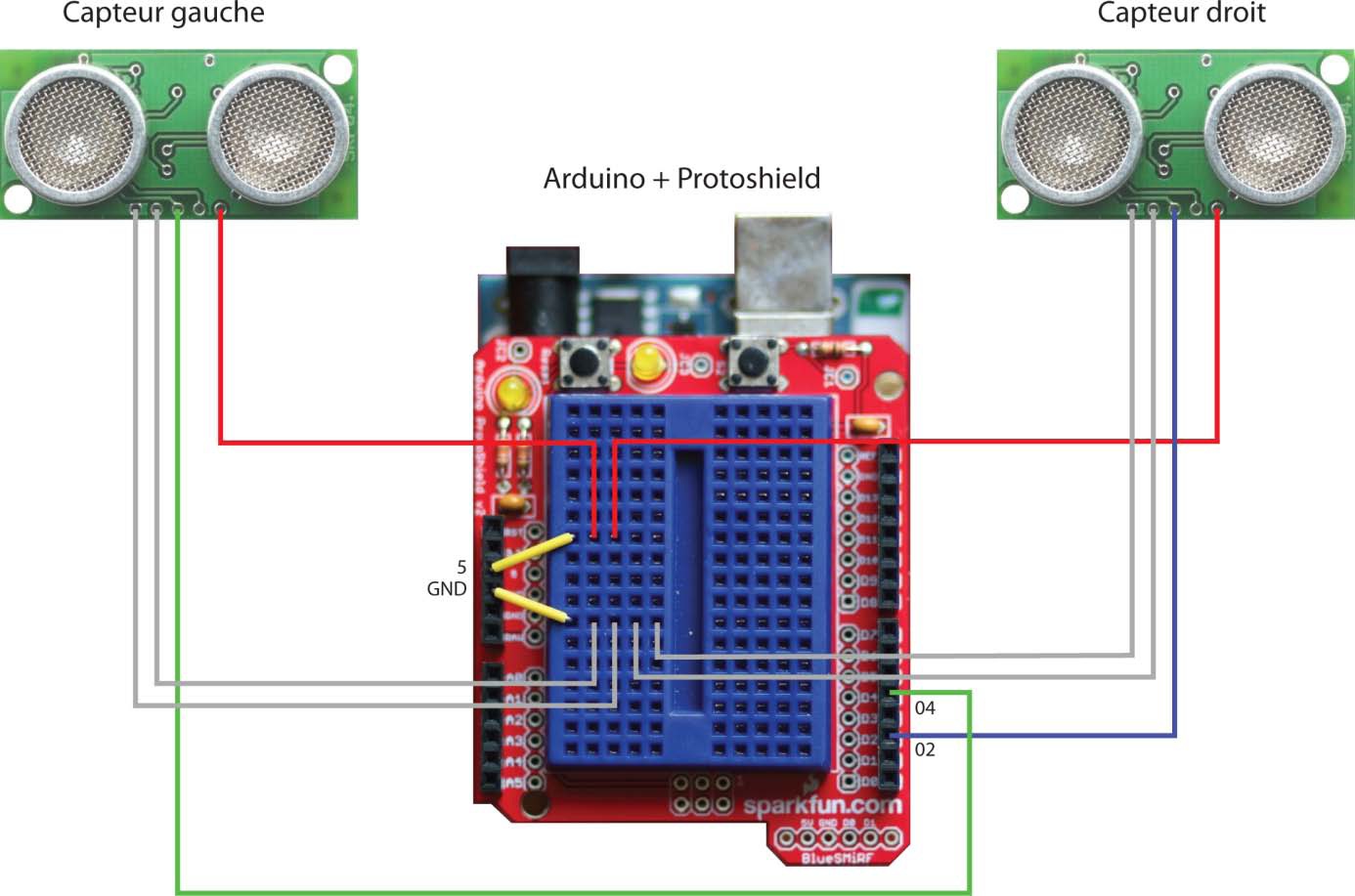

Cette étape nécessite un peu de soudure au niveau des capteurs (afin d’éviter les faux contacts)
- Placer le montage Arduino/ProtoShield dans une boîte et s’assurer que les fils sont bien fixés et ne bougent plus en refermant la boîte
- Brancher la carte Arduino au PC par le câble USB, et placer les capteurs à gauche et à droite (de façon à pouvoir élever la main gauche au dessus du capteur gauche et la main droite au dessus du capteur droit)
- Installer les drivers de la carte Arduino
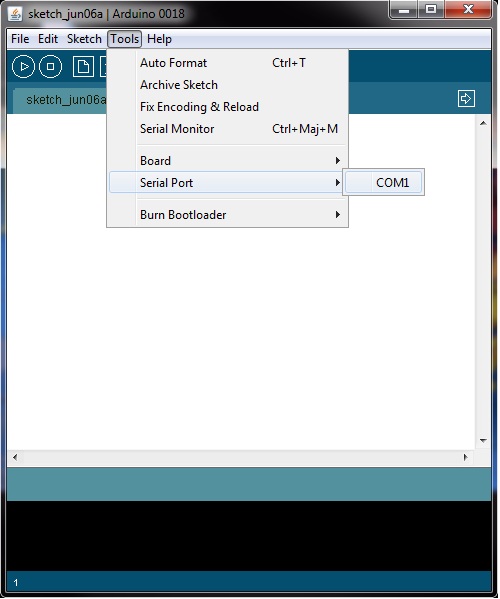
- Télécharger le logiciel Arduino, le lancer, sélectionner le port sur lequel est branché la carte Arduino (onglet Tools/Serial Port).
Deux techniques pour connaître le port en question :
o Débrancher et rebrancher la carte Arduino et vérifier quel port disparaît et réapparaît dans la liste des ports du logiciel Arduino (onglet Tools/Serial Port)
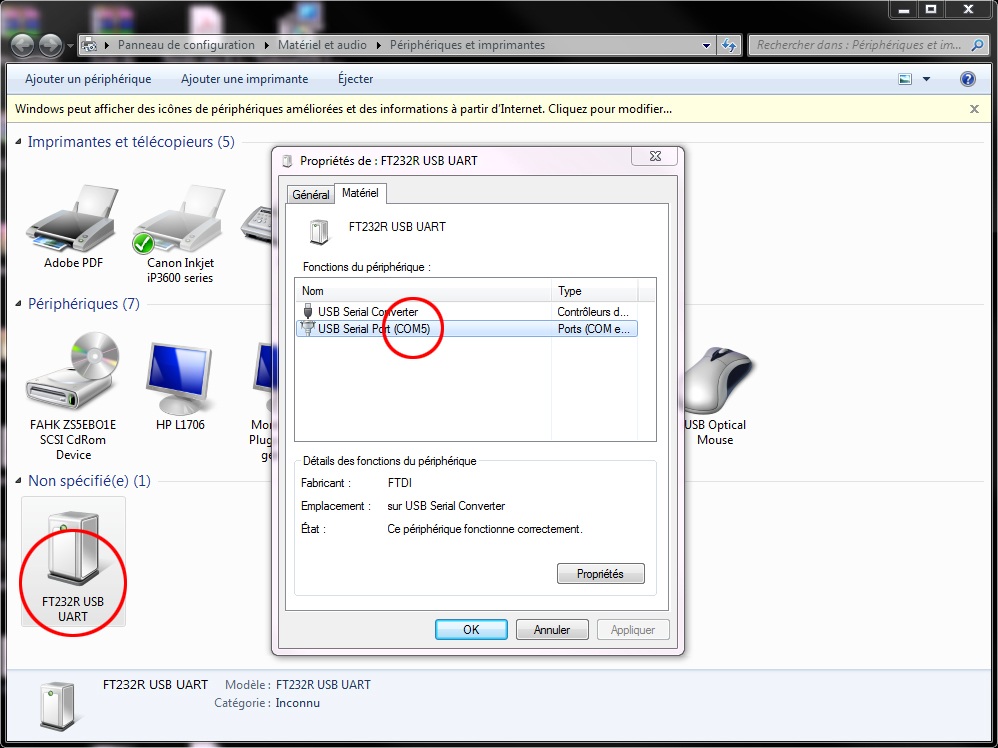
Ouvrir « périphériques et imprimantes », double cliquer sur « FT232R USB UART » et vérifier le port dans l’onglet Matériel
- Transférer le Code suivant (ultrasound_double_arduino.pde) sur la carte arduino, via le logiciel Arduino (bouton upload) :

Tester (bouton « serial monitor » du logiciel Arduino) :

Le code affiche -1 lorsqu’une main n’est pas au dessus du capteur, ou la hauteur en cm de la main par rapport au capteur lorsqu’elle est au dessus.
Il se peut qu’il y ait des interférences si le capteur est à proximité d’objets, et que le capteur ne renvoie pas -1 mais la distance entre le capteur et l’objet détecté. C’est pourquoi les capteurs doivent être isolés de tout objet pouvant perturber l’expérience.
- Il est possible de tester le dispositif de manière graphique, via le logiciel Processing :
o Télécharger Processing
o Lancer le code « ultrasound_double_processing.pde ». La première fois, le code ne se lancera certainement pas car il faut choisir le bon port. Ce premier lancement permet d’afficher la liste des ports disponibles et leur affectation dans le tableau Serial.list. Changer la case du tableau Serial.list avec celle contenant le bon port, à la ligne suivante dans le code : myPort = new Serial(this, Serial.list()[1], 9600);
Dans cet exemple, le 1 est à modifier.
o Relancer le code. Lorsque l’on agite ses mains au dessus des capteurs, les « ailes » de l’oiseau schématisé à l’écran suivent les gestes.